据原力灵机官方消息,其正式推出全球首个具身原生大模型 DM0,并同步开放 24 亿参数版本全面开源,面向机器人、智能体及多模态交互领域的研发者与产业应用方。该模型在架构设计上深度耦合感知、决策与行动能力,突出“具身”特性,即模型可在物理世界与环境交互中直接学习与执行任务,进入全球人工智能研究者、机器人开发者与开源社区视野,被视为具身智能领域迈向通用化与开放共享的关键里程碑。
消息称,DM0 基于原力灵机自主研发的具身原生架构,在训练过程中引入大量真实与仿真环境数据,使模型在理解语言指令的同时,能够关联视觉、触觉、力觉等多模态信息,并生成可执行的连续动作序列。24 亿参数版本在保持较高推理与泛化能力的同时,兼顾计算资源友好性,便于科研团队与中小企业在常规 GPU 环境下进行微调与部署。全面开源策略覆盖模型权重、训练框架、数据处理流程及示例应用,开发者可基于此快速构建适配不同机器人形态与场景的智能控制方案。现场观察显示,DM0 在演示中可完成抓取摆放、避障导航、工具使用等复杂任务,表现出跨场景迁移与少样本适应的潜力。媒体报道指出,这是全球范围内首次将具身原生大模型以开源形式释放,极大降低了具身智能技术的准入门槛,有望加速学术界与产业界在机器人自主学习、人机协作与环境交互上的创新迭代。
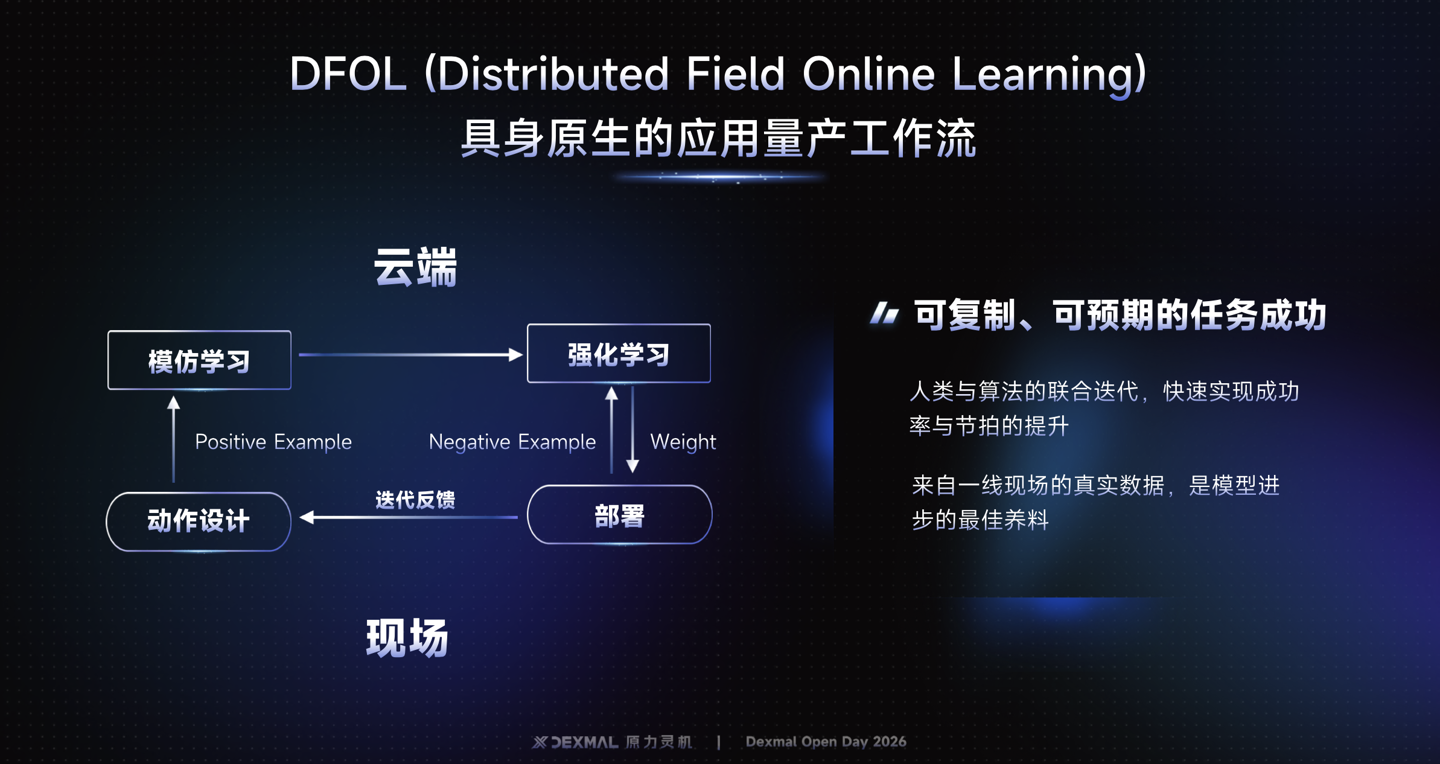
业内认为,原力灵机 DM0 的发布与开源,体现了其在具身智能方向上对通用能力与开放生态的前瞻布局,其“原生”设计理念让模型从底层便围绕物理交互进行优化,而非在传统语言模型之上叠加控制层。此举不仅为机器人研发提供可直接落地的智能核心,也为探索通用人工智能在现实世界的感知—行动闭环提供了实验平台。后续可关注 DM0 在不同硬件平台与任务场景中的适配表现、社区贡献与二次开发案例积累,以及原力灵机在更大参数规模与多模态融合上的迭代路线,这将为观察具身智能从实验室走向规模化应用提供重要参考。